主控板 Raspberry Pi 4 Model B(树莓派 4 代 B 型) 操作系统 Raspberry Pi OS (Raspbian) 编程语言 Python 摄像头 500 万高清像素,160 度广角摄像头 OLED 0.91 英寸,128×32 分辨率 WIFI 模式 AP 模式 (自创热点)/STA 模式(连接路由器) 安全保护 防过充、.PIPPY 是一款基于树莓派的开源四足仿生机器狗,搭载树莓派 4 代主控板,更强悍的解决器,更丰富的多媒体性能,更出色的连接性,它能帮助你学习到OpenCV、Python编程、视觉识
第4章:开发环境搭建(48分钟10秒).订阅管理【STM32-V5】STM32F407开发板开源, 丰富软件资源, 强劲硬件配置, 配套600实例, 20套手册带视频教程2023-11-01 淘宝购买地址:购买地址链接 从2013年5月份发布至今,开发板硬件更新过6个版本,软件资料更新过142次。当前标准库最新版本V9.2,HAL库最新版本V5.6 安富莱微信 3.2 主控STM32F407IGT6简介 3.3 STM32-V5开发板软件介绍 3.4 STemWin书籍 3.5 开发板资源获取 第4章:开发环
在本实验 Webots搭建麦轮小车1 中,我们将学习如何使用Webots仿真软件构建一个具有麦轮的小车模型,并达成目标其基本的运动控制.文章浏览阅读7.9k次,点赞12次,收藏106次。从零搭建麦轮小车绘制3D模型(Solidworks建模)全图部件图电机共轴器麦克纳姆轮实物图硬件电路搭建驱动器选用的是BLDC300W24V直流无刷控制器,有霍尔版本。通过PWM占空比控制速度接线示意图驱动器端电机端实物连接图_麦轮小车solidwo
ArduPilotMega 自动驾驶仪(简称 APM 自驾仪)是一款非常优秀而且完全开源的自动驾驶控制器,可运用于固定翼、直升机、多旋翼、地面车辆等,与此同时还可以搭配多款功能强大的地面控制站使用.这里将带领感兴趣的朋友,从组装调试开始,到飞控代码检视,地面站软件构架讲解,后台服务器搭建,实时流媒体视频传输系统的搭建的深入检视和学习.
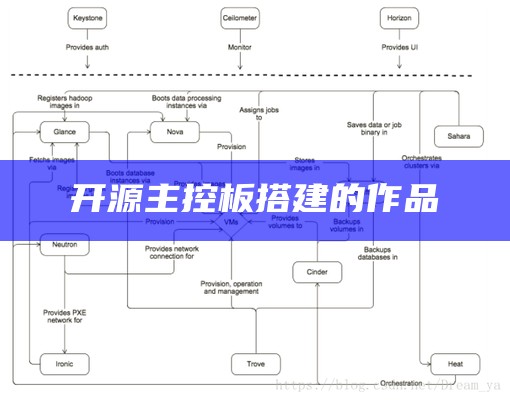
OpenStack是一个开源的云计算管理平台项目,由几个主要的组件组合起来完成确切工作.我是在本地自己搭建yum源进行安装,也可以使用网络的源,如果是Vmware的话直接搭建在controller节点上即可!!!.OpenStack除了有 Rackspace 和 NASA 的大力支援外,还有包括 Dell、Citrix、 Cisco、 Canonical等重量级公司的贡献和支援,发展速度非常快,有取代另一个业界领先开源云平台 Eucalyptus 的态势。.
陈伟 分享资料个 关注 PCB图如下: 描述 ESP8266 矩阵时钟(主控板PCB(2 of 2)) 主要特点: ESP-12S为主控,外围电路少 DS3231MZ+时钟芯片,下线时间准确(买的时候好像5RMB左右,现在不知道要多少钱) MAX7219驱动点阵LED 使用小点阵LED,可以直接去性爱 串口使用小包CH340N不支援自动下载,可以用CH330N代替 下载并关注上传者 开通VIP,低至0.08元下载/次 声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其
开源项目作品 — STM32智能遥控器开发板,两轮和四轴飞行器必备-电路方案.OpenTX在linux下的开发环境搭建方法,使用QT creator作为IDE工具,方便阅读代码和调试硬件程序,其他嵌入式开发环境搭建也可采用此方法。.
某宝企业店铺名:几何三维 三维模型,软件教程,开源资料均已分享到wlzk.net.视频播放量 869、弹幕量 0、点赞数 42、投硬币枚数 2、收藏人数 6、转发人数 1, 视频作者 物联智控, 作者简介 想象力比知识更关键,专注于研发最具性价比的3d打印机。 某宝企业店铺名:几何三维 三维模型,软件教程,开源资料均已分享到wlzk.net,相关视频:写字机器人的第三种控制方式,一键脱机写字。再也回不去了……,练字,不到
这部分直接参考官方给的环境搭建,非常完整,不在重复编写STM32运行:https://github.com/RT-Thread/rt-thread/tree/master/bsp/stm32.项目名 Github 地址 鲲鹏战队 鲲鹏战车 https://github.com/Eronwu/roc_robot 以下是RT-Thread DIY 智能车赛1000元优胜奖得主——鲲鹏战队的作品分享!.
MiniFly四轴飞行器主控板实物截图:MiniFly四轴遥控器实物截图:MiniFly四轴飞行器设计参数如下:附件资料截图:可能感兴趣的项目设计:大赛一等奖-基于STM32F4的四轴航拍飞行器资料开源,链接:来自:时间:2017-10-18. 该MiniFly四轴飞行器硬件主要组成包括四轴主控板和四轴遥控器两部分,确切主要包括电机、电调、电池、浆叶、机架、遥控器、飞控等.